×
[PR]上記の広告は3ヶ月以上新規記事投稿のないブログに表示されています。新しい記事を書く事で広告が消えます。
本日、無事に自分も普通自動車免許を取得しました。やっとこさ(^^;)
仮免とったのいつだよ!?って話ですね。4ヶ月も前です。スイマセン(汗)
結局、一緒にはじめた連中の中で取得したのビリッけつだ…。その代わりマイペースをつらぬきましたっ!!(爆)キャンセル待ち一回もしてないっス!
…………
ひさびさに書き込むついでにロボットの近況をば。
はしか騒動でずいぶん間が空いてしまいましたが、最近になって光麗の開発を再開し始めました。いまは足首周りを改良しています。
いまさらなぜか?っていうと重心移動が困難になったからです。前の書き込みをしてからちょっくらモーションをやってみたところ、重心が高くなったせいか、上手く体重が乗らないという事態が起きまして。しかも上半身改修前の設計で足首ロールの稼動範囲を重心移動が出来るギリギリの位置で詰めてしまったため、ハードの問題として歩行その他が出来ないという事態に陥ってしまったわけです。というわけで、現在稼動範囲を広くした代替部品を製作中です。いやぁ、どんな部分でも余裕を持たせるというのは大事ですね。これから二足をつくろうという人は、ぜひ気をつけてくださいまし。
あと、足裏も改良中でっす。えー、前回、足裏に衝撃吸収剤+プラ板(塩ビ板?)をつけたところ、今までよりかなり滑りがよくなりました。どのくらいかっていうと、サイドステップとしてつくったモーションで180度旋回(※10秒以内)を楽々クリアしてしまうほどです!(←どんなやねん!!)。
でもって、今までより転倒しやすくなりました。結論をいうとダメダメですorz
で、なんでかなーと考えていたところ、思い当たる節が…。

足裏断面図 <clickで拡大
↑は今の足裏の断面図です。衝撃吸収剤はけっこうやわらかいです。プラ板もあまり硬いものではありません。中の隙間は意図的なものです。
そんでもって、コイツの片側に体重をかけると…↓
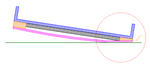
<clickで拡大
おわー、保持できてねぇ。足裏の意味ないじゃん!
まぬけな設計だ!やっちまった!…当初はインスピレーションで土踏まずみたいな(?)効果を期待したんですがね…(汗;)
―――という感じで試行錯誤している次第であります。了
仮免とったのいつだよ!?って話ですね。4ヶ月も前です。スイマセン(汗)
結局、一緒にはじめた連中の中で取得したのビリッけつだ…。その代わりマイペースをつらぬきましたっ!!(爆)キャンセル待ち一回もしてないっス!
…………
ひさびさに書き込むついでにロボットの近況をば。
はしか騒動でずいぶん間が空いてしまいましたが、最近になって光麗の開発を再開し始めました。いまは足首周りを改良しています。
いまさらなぜか?っていうと重心移動が困難になったからです。前の書き込みをしてからちょっくらモーションをやってみたところ、重心が高くなったせいか、上手く体重が乗らないという事態が起きまして。しかも上半身改修前の設計で足首ロールの稼動範囲を重心移動が出来るギリギリの位置で詰めてしまったため、ハードの問題として歩行その他が出来ないという事態に陥ってしまったわけです。というわけで、現在稼動範囲を広くした代替部品を製作中です。いやぁ、どんな部分でも余裕を持たせるというのは大事ですね。これから二足をつくろうという人は、ぜひ気をつけてくださいまし。
あと、足裏も改良中でっす。えー、前回、足裏に衝撃吸収剤+プラ板(塩ビ板?)をつけたところ、今までよりかなり滑りがよくなりました。どのくらいかっていうと、サイドステップとしてつくったモーションで180度旋回(※10秒以内)を楽々クリアしてしまうほどです!(←どんなやねん!!)。
でもって、今までより転倒しやすくなりました。結論をいうとダメダメですorz
で、なんでかなーと考えていたところ、思い当たる節が…。
足裏断面図 <clickで拡大
↑は今の足裏の断面図です。衝撃吸収剤はけっこうやわらかいです。プラ板もあまり硬いものではありません。中の隙間は意図的なものです。
そんでもって、コイツの片側に体重をかけると…↓
<clickで拡大
おわー、保持できてねぇ。足裏の意味ないじゃん!
まぬけな設計だ!やっちまった!…当初はインスピレーションで土踏まずみたいな(?)効果を期待したんですがね…(汗;)
―――という感じで試行錯誤している次第であります。了
PR
この記事にコメントする
リンク
プロフィール
HN:
総工研07年度OB 二足 E班
HP:
性別:
男性
職業:
大学生(当時)
自己紹介:
千葉工業大学のロボットサークル「総合工学研究会」2007年度OB(2009.03卒業)の二足歩行ロボット・E班。
二足歩行ロボット「光麗」が最後の作品。ロボットは技術より格好にこだわるスタンスで制作。
ちなみに班長はデザイン学科という理由だけで、入部初期から部のポスター・ビラを一手に任されていたので、その手の話題も。一時期の部のポスターがデザイン凝っていたのはこの人のせい。ホームページに貼ってあるタイトルバナーもこの人が作りました。
二足歩行ロボット「光麗」が最後の作品。ロボットは技術より格好にこだわるスタンスで制作。
ちなみに班長はデザイン学科という理由だけで、入部初期から部のポスター・ビラを一手に任されていたので、その手の話題も。一時期の部のポスターがデザイン凝っていたのはこの人のせい。ホームページに貼ってあるタイトルバナーもこの人が作りました。