×
[PR]上記の広告は3ヶ月以上新規記事投稿のないブログに表示されています。新しい記事を書く事で広告が消えます。
本日、無事に自分も普通自動車免許を取得しました。やっとこさ(^^;)
仮免とったのいつだよ!?って話ですね。4ヶ月も前です。スイマセン(汗)
結局、一緒にはじめた連中の中で取得したのビリッけつだ…。その代わりマイペースをつらぬきましたっ!!(爆)キャンセル待ち一回もしてないっス!
…………
ひさびさに書き込むついでにロボットの近況をば。
はしか騒動でずいぶん間が空いてしまいましたが、最近になって光麗の開発を再開し始めました。いまは足首周りを改良しています。
いまさらなぜか?っていうと重心移動が困難になったからです。前の書き込みをしてからちょっくらモーションをやってみたところ、重心が高くなったせいか、上手く体重が乗らないという事態が起きまして。しかも上半身改修前の設計で足首ロールの稼動範囲を重心移動が出来るギリギリの位置で詰めてしまったため、ハードの問題として歩行その他が出来ないという事態に陥ってしまったわけです。というわけで、現在稼動範囲を広くした代替部品を製作中です。いやぁ、どんな部分でも余裕を持たせるというのは大事ですね。これから二足をつくろうという人は、ぜひ気をつけてくださいまし。
あと、足裏も改良中でっす。えー、前回、足裏に衝撃吸収剤+プラ板(塩ビ板?)をつけたところ、今までよりかなり滑りがよくなりました。どのくらいかっていうと、サイドステップとしてつくったモーションで180度旋回(※10秒以内)を楽々クリアしてしまうほどです!(←どんなやねん!!)。
でもって、今までより転倒しやすくなりました。結論をいうとダメダメですorz
で、なんでかなーと考えていたところ、思い当たる節が…。

足裏断面図 <clickで拡大
↑は今の足裏の断面図です。衝撃吸収剤はけっこうやわらかいです。プラ板もあまり硬いものではありません。中の隙間は意図的なものです。
そんでもって、コイツの片側に体重をかけると…↓
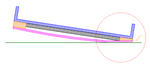
<clickで拡大
おわー、保持できてねぇ。足裏の意味ないじゃん!
まぬけな設計だ!やっちまった!…当初はインスピレーションで土踏まずみたいな(?)効果を期待したんですがね…(汗;)
―――という感じで試行錯誤している次第であります。了
仮免とったのいつだよ!?って話ですね。4ヶ月も前です。スイマセン(汗)
結局、一緒にはじめた連中の中で取得したのビリッけつだ…。その代わりマイペースをつらぬきましたっ!!(爆)キャンセル待ち一回もしてないっス!
…………
ひさびさに書き込むついでにロボットの近況をば。
はしか騒動でずいぶん間が空いてしまいましたが、最近になって光麗の開発を再開し始めました。いまは足首周りを改良しています。
いまさらなぜか?っていうと重心移動が困難になったからです。前の書き込みをしてからちょっくらモーションをやってみたところ、重心が高くなったせいか、上手く体重が乗らないという事態が起きまして。しかも上半身改修前の設計で足首ロールの稼動範囲を重心移動が出来るギリギリの位置で詰めてしまったため、ハードの問題として歩行その他が出来ないという事態に陥ってしまったわけです。というわけで、現在稼動範囲を広くした代替部品を製作中です。いやぁ、どんな部分でも余裕を持たせるというのは大事ですね。これから二足をつくろうという人は、ぜひ気をつけてくださいまし。
あと、足裏も改良中でっす。えー、前回、足裏に衝撃吸収剤+プラ板(塩ビ板?)をつけたところ、今までよりかなり滑りがよくなりました。どのくらいかっていうと、サイドステップとしてつくったモーションで180度旋回(※10秒以内)を楽々クリアしてしまうほどです!(←どんなやねん!!)。
でもって、今までより転倒しやすくなりました。結論をいうとダメダメですorz
で、なんでかなーと考えていたところ、思い当たる節が…。
足裏断面図 <clickで拡大
↑は今の足裏の断面図です。衝撃吸収剤はけっこうやわらかいです。プラ板もあまり硬いものではありません。中の隙間は意図的なものです。
そんでもって、コイツの片側に体重をかけると…↓
<clickで拡大
おわー、保持できてねぇ。足裏の意味ないじゃん!
まぬけな設計だ!やっちまった!…当初はインスピレーションで土踏まずみたいな(?)効果を期待したんですがね…(汗;)
―――という感じで試行錯誤している次第であります。了
PR
足首および足裏 改良~。足首ロールをつなげるパーツを新たに作り直しました。マキナを見習ってこんなカタチに↓
見た感じの安定感は良くなりましたね。ちょっと満足。
あと足裏を改造。
ちゃんとした衝撃吸収剤を張って、その上から滑りがよくなるようにプラ板を重ねました。また、ウェイト(重り)として40gの鉄板をそれぞれの足裏に内蔵しました。(やったあとで鉄板にするんじゃなかった!と思いましたが…。鉄の硬さを思い知りました。なんだか知らんけど平面パーツなのにネジ穴ずれるし。でも銅や真鍮は値段が…orz)
足裏を改造したのがモーションにどう影響するのかが今後の焦点ですね。ウチのサークルは足裏をいじったロボットがほとんどないので参考に出来ないのです。
はてさてどうなるやら。
 <click!
<click! 相方にプログラム頼んだら「新しく作ったパーツに色塗れやコラァ!(一部誇張表現アリ)」と言われてしまったので色塗りました。どうせ隠れる部分だからいいやとタカくくってたんですが。黒いとシックですね。やはりヒキョーな色だブラック(←使っておきながら)。
次。
新しい上半身をバキュームしてシリコンで成形。外装の土台です。一度やっただけあってさすがに行動が早くなった。
あとはプロポで動かせるようになればなんとか…。
足裏もいじりたいなぁ。
ふと、いま何gあるのだろうと気になったので久々に光麗の重量を測ってみました。
結果:総重量2015g(回路&バッテリー込み)
ちょっと重くなった…か?新設計で胸部ブロックのアルミ使用量は減ったものの、バックパックを増設気味に造ったのが主な原因でしょうか。あっ、今回はバラバラの状態の部品で測ったので、一部スラストベアリングとその付近の部品を測り忘れた; それを考慮するともう数g増える見込みですかね。
ちなみに重心の参考までに上半身と下半身を測り比べてみました。
結果:
上半身852g
下半身1163g
でした。…一応上半身のほうが軽いんだな。上半身に重心があるように感じるのは体積あたりの質量密度が高いからなのかなー…。
もうどうせ総重量が2kgを超えてるなら、下半身にウェイトを設けたりして重心調整しようかな…。
結果:総重量2015g(回路&バッテリー込み)
ちょっと重くなった…か?新設計で胸部ブロックのアルミ使用量は減ったものの、バックパックを増設気味に造ったのが主な原因でしょうか。あっ、今回はバラバラの状態の部品で測ったので、一部スラストベアリングとその付近の部品を測り忘れた; それを考慮するともう数g増える見込みですかね。
ちなみに重心の参考までに上半身と下半身を測り比べてみました。
結果:
上半身852g
下半身1163g
でした。…一応上半身のほうが軽いんだな。上半身に重心があるように感じるのは体積あたりの質量密度が高いからなのかなー…。
もうどうせ総重量が2kgを超えてるなら、下半身にウェイトを設けたりして重心調整しようかな…。
新しい上半身が完成しました。
[正面] [側面] [背面]
こんな感じ。回路が背中に移ったことで、背中が膨らみましたが、思ったより違和感はないです。前もそうだったけど、背中のボリュームが増加することに関しては結構許容範囲が広いのか…?
それよりも深刻そうなのはロボットの重心がより上方に、そして後方に来たことです。これが回路を背中に配置したくなかった一番の理由です…。触った感じの感想なので、実際に動かした時に影響がなければそれでいいのですが。
とまぁ煮え切らないことも数多いですが、プロポーションが良くなったのはやっぱり自分的に大きいなぁ。うん、これならモチベーションを維持できそうだ。このやる気を上手く活用できればいいのですね。
リンク
プロフィール
HN:
総工研07年度OB 二足 E班
HP:
性別:
男性
職業:
大学生(当時)
自己紹介:
千葉工業大学のロボットサークル「総合工学研究会」2007年度OB(2009.03卒業)の二足歩行ロボット・E班。
二足歩行ロボット「光麗」が最後の作品。ロボットは技術より格好にこだわるスタンスで制作。
ちなみに班長はデザイン学科という理由だけで、入部初期から部のポスター・ビラを一手に任されていたので、その手の話題も。一時期の部のポスターがデザイン凝っていたのはこの人のせい。ホームページに貼ってあるタイトルバナーもこの人が作りました。
二足歩行ロボット「光麗」が最後の作品。ロボットは技術より格好にこだわるスタンスで制作。
ちなみに班長はデザイン学科という理由だけで、入部初期から部のポスター・ビラを一手に任されていたので、その手の話題も。一時期の部のポスターがデザイン凝っていたのはこの人のせい。ホームページに貼ってあるタイトルバナーもこの人が作りました。